- آموزش بازار سهام جهانی و بازارهای مالی
- کلیفورد شانس
- تجارت موقعیت چیست؟مزایا و مضرات تجارت موقعیت
- گزارش بازارهای جهانی - 1 مارس
- چگونه بدون پول یک کسب و کار راه اندازی کنیم
- بحث ناهار zew در بروکسل - موانع آشنا و رویکردهای جدید در سیاست جهانی آب و هوا
- بهترین سیگنال های رمزنگاری بیت کوین
- راهنمای ساده برای بهترین کیف پول Zcash در سال 2023
- tradergav. com
- Olymptrade - حساب نگهداری - پول متوقف ، ثبت نام

آخرین مطالب
امکانات وب


تکامل فعلی هر دو الگوریتم تجزیه و تحلیل بافت و فناوری رایانه باعث افزایش توسعه الگوریتم های جدید برای تعیین کمیت خصوصیات بافتی یک تصویر و برای تصویربرداری پزشکی در سالهای اخیر شد. نتایج امیدوارکننده توانایی روشهای تجزیه و تحلیل بافت را برای استخراج اطلاعات تشخیصی معنی دار از تصاویر پزشکی که با روشهای مختلف تصویربرداری مانند توموگرافی انتشار پوزیترون (PET) و تصویربرداری رزونانس مغناطیسی (MRI) بدست آمده است ، نشان داده اند. از بین تکنیک های تجزیه و تحلیل بافت ، هندسه فراکتال به ابزاری در تجزیه و تحلیل تصویر پزشکی تبدیل شده است. در حقیقت ، مفهوم بعد فراکتال می تواند در تعداد زیادی از برنامه ها ، مانند تجزیه و تحلیل شکل [1] و تقسیم تصویر [2] استفاده شود. جالب اینجاست که ، حتی اگر این واقعیت که خود شفقت به سختی می تواند در اشیاء بیولوژیکی تصویربرداری شده با وضوح محدود تأیید شود ، شباهت های خاصی در مقیاس های مختلف مکانی کاملاً مشهود است. دقیقاً ، بعد فراکتال توانایی توصیف و توصیف پیچیدگی تصاویر یا دقیق تر از ترکیب بافت آنها را فراهم می کند.
2. فراکتال
2. 1هندسه
یک فراکتال یک شیء هندسی است که با دو ویژگی اساسی مشخص می شود: خود شفقت و بعد Hausdorff Besicovich. یک شیء خودی دقیقاً یا تقریباً شبیه به بخشی از خود است و می تواند به طور مداوم در قسمت هایی تقسیم شود که هر یک از آنها (حداقل تقریباً) یک کپی در مقیاس کاهش یافته از کل است. علاوه بر این ، یک فراکتال به طور کلی اشکال نامنظم را نشان می دهد که به سادگی با ابعاد اقلیدسی قابل توصیف نیست ، اما ، بعد فراکتال (F D) باید برای گسترش مفهوم بعد برای این اشیاء معرفی شود. با این حال ، بر خلاف ابعاد توپولوژیکی ، FD می تواند مقادیر غیر پیر را بگیرد ، به این معنی که روشی که یک مجموعه فراکتال فضای خود را پر می کند از نظر کیفی و کمی متفاوت از نحوه انجام یک مجموعه هندسی معمولی است.
طبیعت انواع زیادی از اشکال فراکتالی ، از جمله درختان ، سنگ ها ، کوه ها ، ابرها ، سازه های بیولوژیکی ، دوره های آب ، خطوط ساحلی ، کهکشان ها را نشان می دهد [3]. علاوه بر این ، می توان اشیاء ریاضی را ساخت که شرایط شفابتی بودن را برآورده می کند و FD موجود را برآورده می کند (شکل 1).

شکل 1.
مثلث Sierpinski: با شروع یک پیکربندی اولیه ساده واحدها یا با یک شیء هندسی ، پیکربندی دانه ساده به طور مکرر به خود اضافه می شود به گونه ای که پیکربندی بذر به عنوان یک واحد در نظر گرفته می شود و در ساختار جدید این واحدها با توجه به تنظیم می شوندیکدیگر با توجه به همان تقارن به عنوان واحدهای اصلی در پیکربندی بذر. و غیره
اشیاء موجود در شکل 1 خودکشی هستند زیرا بخشی از جسم شبیه به کل است و بعد فراکتال توسط معادله قابل محاسبه است:
در جایی که n تعداد قطعات شبیه سازی خودکار است که در آن می توان یک شیء را تقسیم کرد و S مقیاس بندی است ، یعنی عامل مورد نیاز برای مشاهده قطعات شبیه به صورت خودکار. با توجه به EQ. 1 ، مقادیر زیر برای مثلث Koch Fractal و Sierpinski به دست می آید:
در ریاضیات ، هیچ تعریف جهانی از FD وجود ندارد و چندین تعریف از FD ممکن است به نتایج متفاوتی برای همان شی منجر شود. در میان طیف گسترده ای از تعاریف FD که معرفی شده است ، ابعاد Hausdorff D H مطمئناً مهمترین و پرکاربردترین مورد استفاده است [4]. چنین تعریفی می تواند از نظر تئوری برای هر مجموعه فراکتال اعمال شود اما دارای ضرر است که همیشه با روشهای محاسباتی به راحتی نمی توان آن را تعیین کرد.
2. 2ابعاد Hausdorff D H
Hausdorff Dimension D H در سال 1918 توسط فلیکس هاوسدورف ریاضی معرفی شد [3]. از آنجا که بسیاری از تحولات فنی مورد استفاده برای محاسبه بعد Hausdorff برای مجموعه های بسیار نامنظم توسط Abram Samoilovitch Besicovitch به دست آمد ، D H گاهی اوقات Hausdorff-Besicovitch Dimension نامیده می شود.
فرمولاسیون Hausdorff [3] بر اساس ساخت یک اندازه گیری خاص ، H Δ D است که نشان دهنده چگالی یکنواخت شیء فراکتال است.
به طور شهودی می توانیم ساخت و ساز را به شرح زیر خلاصه کنیم: بگذارید یک فراکتال و C (r ، a) باشد =پوشش کاملی از یک حوزه از قطر کوچکتر از R داده شده است که تقریبی A ، بنابراین Δ I = Δ I (B I)
ما اندازه گیری Hausdorff را به عنوان عملکرد H Δ D تعریف می کنیم که کوچکترین از تمام کره های پوشش دهنده را برای A با δ مشخص می کند
با حجم ω D کره واحد در R D برای عدد صحیح d.
ما یک اندازه گیری تقریبی از A ، به اصطلاح حجم دانه در دوره را بدست می آوریم [4].
در مورد یک بعدی (D = 1) ، H Δ D طول مجموعه A را با یک خط کش طول r اندازه گیری می کند. حاکم کوتاه تر ، طول آن اندازه گیری طولانی تر ، یک پارادوکس معروف به پارادوکس خط ساحلی است [3].
از این رو ، هنگامی که R → 0 طول مؤثر A به خوبی تقریب می یابد. محدود برای R کوچک محاسبه شده برای مقادیر دیگر D ، با این حال ، منجر به انحطاط H Δ D می شود:
بنابراین ، D H می تواند به عنوان نقطه انتقال برای عملکرد H Δ D به صورت یکنواخت با D کاهش یابد:
با H Δ D ، اندازه گیری D- بعدی Hausdorff داده شده توسط Eq. 3
حجم دانه ای که توسط Eq تعریف شده است. 3 به طور معمول مقیاس بندی مانند:
که روشی برای تخمین ابعاد D H فراهم می کند.
در مورد یک بعدی D = 1 می توانیم به راحتی بدست آوریم:
که از آن D H استفاده می کنیم.
3. روشها
اگرچه تعریف بعد Hausdorff به ویژه برای تعریف عملیاتی FD مفید است ، که هنگام اجرای آن مشکلاتی را ایجاد می کند. در حقیقت ، تعیین مقدار محدود پایین همه پوشش ها ، همانطور که در Eq تعریف شده است. 5 ، می تواند کاملاً پیچیده باشد. به عنوان مثال ، بیایید مورد یک بعدی را در نظر بگیریم ، که در آن می خواهیم FD یک خط ساحلی (منحنی کوچ) را محاسبه کنیم. با توجه به Eq. 3 در مورد d = 1 طول خط ساحلی توسط یک حاکم طول r اندازه گیری می شود. دقت این اندازه با کاهش r افزایش می یابد. برای R → 0 خط ساحلی دارای طول بی نهایت خواهد بود. آرگومان های مشابه می توانند برای d = 2 اعمال شوند. برای R → 0 اندازه گیری H Δ D → 0.
این بحث حاکی از آن است که خط ساحلی ما (به عنوان مثال منحنی Koch) دارای مقدار FD بیش از یک بعدی و کمتر از دو بعدی خواهد بود. به همین دلیل ، FD به عنوان نقطه انتقال (مقدار مرز پایین در معادله 5) بین H Δ D → 0 و H Δ D → در نظر گرفته می شود.
چندین رویکرد محاسباتی برای جلوگیری از نیاز به تعریف محدوده پایین در مسئله ایجاد شده است. بنابراین بسیاری از استراتژی ها با بازیابی آن از مقیاس بندی فله شی با اندازه آن ، محاسبه FD را انجام دادند. در حقیقت ، فله شیء و اندازه آن در مقیاس لگاریتمی رابطه خطی دارد به طوری که شیب بهترین خط مناسب ممکن است تخمین دقیقی از این رابطه ارائه دهد. با استفاده از این نمودار ورود به سیستم ، به نام طرح ریچاردسون ، نیاز به دانستن اطلاعات مربوط به همه پوشش ها آرام است.
چندین روش برای برآورد ابعاد فراکتال تصاویر ایجاد شده است. به طور خاص ، این بخش دو استراتژی تجزیه و تحلیل فراکتال را معرفی می کند: روش شمارش جعبه و روش دست و تقسیم کننده.
این روشها با انتخاب به عنوان پوشش یک شبکه ثابت مستطیل ساده به منظور بدست آوردن یک مرز فوقانی در D H ، بر مشکل غلبه می کنند.
پنج الگوریتم برای یک محاسبه عملی FD بر اساس این روش ها نیز ارائه می شود.
3. 1روش شمارش جعبه
محبوب ترین روش با استفاده از بهترین روش مناسب ، به اصطلاح روش شمارش جعبه است [5] [6]. با توجه به یک ساختار فراکتال ، در یک حجم D بعدی تعبیه شده است ، روش شمارش جعبه اساساً شامل تقسیم فضای سازه با یک شبکه ثابت D بعدی از جعبه های مربع با اندازه برابر r است.
تعداد N (r) جعبه های غیر خالی از اندازه R مورد نیاز برای پوشاندن ساختار فراکتال به R بستگی دارد:
الگوریتم شمارش کادر از این رو تعداد n (r) را برای مقادیر مختلف r شمارش می کند و ورود به سیستم شماره n (r) را در مقابل ورود به سیستم جعبه واقعی r قرار می دهد. مقدار ابعاد شمارش جعبه D از طرح بهترین منحنی متناسب با طرح ریچاردسون تخمین زده می شود.
شکل 2 روش شمارش جعبه برای منحنی Koch را نشان می دهد.

شکل 2.
روش شمارش جعبه با اندازه جعبه R = 0. 4 (a) به منحنی Koch اعمال می شود. r = 1 (b) ؛r = 1. 4 (c) ؛r = 2 (د)
چندین الگوریتم [7] [8] [9] بر اساس روش شمارش جعبه توسعه یافته و به طور گسترده ای برای برآورد FD مورد استفاده قرار گرفته است ، زیرا می توان آن را برای مجموعه هایی با یا بدون شغلی استفاده کرد. با این حال ، در محاسبه FD با این روش ، یکی از آنها را حساب می کند یا یک جعبه را مطابق با این که آیا هیچ نقطه یا برخی از نقاط در جعبه وجود ندارد ، حساب نمی کند یا حساب نمی کند. برای وزنه برداری جعبه با توجه به تعداد نقاط متعلق به فراکتال و داخل جعبه فعلی ، هیچ گونه مقرراتی فراهم نشده است.
3. 2روش دست و تقسیم کننده
ویژگی ها و اطلاعات مفید را می توان از خطوط سازه های متعلق به یک تصویر کسر کرد و تعدادی از تکنیک ها وجود دارد که می توان هنگام تخمین بعد فراکتال مرزی استفاده کرد.
محبوب ترین روش ها بر اساس روش دستی و متنوع است که در ابتدا توسط ریچاردسون [10] معرفی شده و به طور پی در پی توسط ماندلبروت [11] ساخته شده است.
روش ریچاردسون از تکنیک به اصطلاح پیاده روی متشکل از "پیاده روی" در اطراف مرز سازه با طول مرحله معین استفاده می کند.
مرز ساختار واقعی چنان توسط چند ضلعی که طول آن برابر با:
به طور خلاصه ، مطابق با طول مرحله تک ضرب شده توسط تعداد مراحل مورد نیاز برای تکمیل پیاده روی است.
سپس این روند برای طول های مختلف مرحله تکرار می شود:
با P I محیط محاسبه شده با مراحل طول ε i.
FD D مرز شیء در نهایت از: تخمین زده می شود:
جایی که M شیب طرح ریچاردسون است.
طول محیط مرز به طول مرحله مورد استفاده بستگی دارد به طوری که یک مرحله بزرگ تخمین خشن از محیط را فراهم می کند در حالی که یک مرحله کوچکتر می تواند جزئیات دقیق تری از کانتور را در نظر بگیرد.
در نتیجه ، اگر طول مرحله ε کاهش یابد ، محیط P افزایش می یابد.
در عمل ، طول محیط با ساخت یک چند ضلعی عموماً نامنظم که مرز را تقریبی می کند ، بدست می آید. بگذارید Δ B مجموعه مختصات مرز شیء باشد و بگذارید ε یک طول مرحله ثابت باشد. با توجه به یک نقطه شروع ، یک نقطه کانتور دلخواه (X S ، Y S) ، نقطه بعدی در مرز (X S 2 ، Y S 2) در یک جهت ثابت (به عنوان مثال در جهت عقربه های ساعت) نقطه ای است که فاصله دارد
تا آنجا که ممکن است به ε.
سپس نقطه رسیده به نقطه شروع جدید تبدیل می شود و برای یافتن نقطه بعدی در مرز که شرایط قبلی را برآورده می کند ، استفاده می شود. این فرآیند تا رسیدن به نقطه شروع اولیه تکرار می شود.
مجموع مسافت های d J مربوط به محیط چند ضلعی نامنظم است (شکل 3).
تعدادی از محیط های مختلف برای هر چند ضلعی در هر طول مرحله ثابت برای ساخت نقشه ریچاردسون استفاده می شود و شیب بهترین تناسب خطی آن برای تخمین FD مورد سوء استفاده قرار می گیرد.

شکل 3.
تکنیک پیاده روی برای یک ساحل با طول قدم های مختلف اعمال می شود.
4- الگوریتم ها
تمام تکنیک های دست و تقسیم کننده به همان اصل یکسان متکی هستند که سعی در تقریب محیط مرزی با چند ضلعی های مختلف دارند. با این حال ، از آنجا که مختصات نقطه متعلق به مجموعه مرزی گسسته هستند ، تمام روشهای اجرا شده در انتخاب کدام نقطه در مجموعه متفاوت است که دارای فاصله ای است که طول مرحله را بهتر می کند.
دو روش زیر اجرای دو گزینه مختلف در مورد چگونگی غلبه بر این مسئله خاص است.
4. 1الگوریتم ترکیبی
الگوریتم ترکیبی یک روش رایانه ای از روش دست و تقسیم کننده است که توسط کلارک ساخته شده است [12]. بگذارید δ b مرز شیء باشد که FD ما مایل به محاسبه آن هستیم. بخش اصلی این روش بر برآورد محیط متمرکز است و نقشه مربوط به ریچاردسون مربوطه با تکرار این قسمت هسته سخت در اندازه های مختلف مرحله بدست می آید. شکل 4 نمودار جریان روش را نشان می دهد.

شکل 4.
برآورد محیط با استفاده از روش Hybrid Method FlowChart: یک نقطه شروع دلخواه S (X S ، Y S) در خط مرزی در یک متغیر جدید انتخاب و کپی می شود ، که به آن نقطه فعلی C (X C (I) ، Y C (I) گفته می شود). شاخص I از طریق تعداد کل نقاط مختصات اجرا می شود و به طور تکراری افزایش نقطه R در حال اجرا با مختصات (x r ، y r) افزایش می یابد. فاصله D بین S و R محاسبه می شود و هنگامی که کوچکتر از طول مرحله ثابت ε انجام شود ، بررسی D را بررسی می کند. این روند تا زمانی که یک نقطه مرزی که فاصله آن از (x s ، y) بزرگتر از مرحله ε است ، تکرار می شود. نقطه محوری بعدی در خط مرزی با انتخاب بین دو نقطه نزدیکترین به طول مرحله تعیین می شود. فاصله سپس ذخیره می شود و این نقطه به نقطه شروع جدید تبدیل می شود تا بتواند نقطه محوری بعدی و غیره را محاسبه کند ، تا زمانی که به نقطه شروع اولیه برسد.
با توجه به یک نقطه شروع دلخواه و مختصات آن (X S ، Y) در مرز ، الگوریتم در جستجوی نقطه محوری بعدی است. به طور خاص نقطه شروع در یک نقطه فعلی ، C (x c ، y c) کپی می شود ، که تمام نقاط دارای فاصله متقابل در حدود ε را مشخص می کند. نقطه واقعی که در کل مرز اجرا می شود به عنوان نقطه در حال اجرا R (x r ، y r) نشان داده شده است.
بنابراین این برنامه یک نقطه در حال اجرا خاص را با فاصله از C تا حد امکان به مرحله ε جستجو می کند. به طور خاص ، در روش ترکیبی ممکن است مرحله واقعی بسته به حداقل انحراف از آن ، طولانی تر یا کوتاه تر از مرحله ثابت باشد. به طور مشابه هنگامی که نقطه در حال اجرا به یک نقطه کانتور با فاصله از جریان واقعی بزرگتر از مرحله اندازه برخورد کرد ، انتخاب بین آن نقطه و مورد قبلی انجام می شود.
پس از آن ، فاصله محاسبه شده بین این دو نقطه R و C ذخیره می شود و نقطه اجرا به نقطه جریان جدید تبدیل می شود.
این روش تا رسیدن به نقطه شروع اولیه ادامه می یابد. بدیهی است که احتمالاً پس از پیاده روی کامل ، نقطه شروع S ممکن است قبل از برخورد به نقطه فعلی زیر c وجود داشته باشد. به عبارت دیگر ، ممکن است یک اندازه چند مرحله ای ε وجود نداشته باشد تا طول مرحله ناقص نهایی R به سایر مسافت های ذخیره شده اضافه شود ، که مبلغ آن نمایانگر محیط مرز است. از آنجا که طول مرحله ثابت هر بار در طول محاسبه پیرامونی اقتباس می شود ، مقدار متوسط آن در نقشه ریچاردسون محاسبه و استفاده می شود.
4. 2الگوریتم دقیق
الگوریتم دقیق برای اولین بار توسط کلارک در سال 1986 پیشنهاد شد [12]. همانطور که نشان داده می شود ، این روش با ارائه یک راه حل ساده تر برای انتخاب بهترین نقاط فعلی ، نیاز به زمان محاسباتی طولانی تر دارد.
به طور مشابه با روش قبلی ، کل تخمین محیط در نمودار جریان شکل 5 نمایش داده می شود.
این روش بسیار شبیه به روش مورد استفاده برای روش قبلی است. مانند گذشته (شکل 5 را ببینید) ، پایان مرحله ممکن است با مختصات دیجیتالی شده مرز مطابقت نداشته باشد.
روشی که روش دقیق برای غلبه بر این مشکل تلاش می کند به فرض خطی پراکنده متکی باشد ، به این معنی که می توان تمام نقاط موجود در کانتور را با یک سری خط مستقیم [13 ، 14] پیوست (شکل 6 (الف)).
محل جریان جریان بعدی C در مرز از منطقه که قبلاً تعیین شده بود به صورت شماتیک در شکل 6 (b) نشان داده شده است.
این روش از یک نقطه شروع دلخواه (X S ، Y S) شروع می شود و الگوریتم برای نقطه محوری بعدی جستجو می کند. به طور خاص نقطه شروع در یک نقطه فعلی ، C (x c ، y c) کپی می شود ، که تمام نقاط دارای فاصله متقابل در حدود ε را مشخص می کند. نقطه واقعی که در کل مرز اجرا می شود به عنوان نقطه در حال اجرا R (x r ، y r) نشان داده شده است.
فاصله از نقطه جریان تا هر نقطه در خط کانتور محاسبه می شود تا اینکه طول مرحله بین دو نقطه مرزی متوالی ، (x r ، y r) و (x r + 1 ، y r + 1) قرار بگیرد که برای آن:
موقعیت دقیق نقطه n با مختصات (x ، y) با فرآیند درون یابی هندسی بین دو نقطه در حال اجرا متوالی (x r ، y r) و (x r + 1 ، y r + 1) استنباط می شود. سپس این نقطه به نقطه جریان جدید تبدیل می شود و برای محاسبه نقطه مرزی بعدی و غیره استفاده می شود.
این روند زمانی متوقف می شود که ما به نقطه شروع اولیه (X S ، Y) بازگردیم تا یک چند ضلعی به دست بیاوریم همانطور که در شکل 8 نشان داده شده است.

شکل 5
برآورد محیط با استفاده از روش دقیق نمودار: یک نقطه شروع دلخواه S (X S ، Y S) در خط مرزی در یک متغیر جدید انتخاب و کپی می شود ، که به آن نقطه فعلی C (x c (i) ، y c (i)) گفته می شود. شاخص I از طریق تعداد کل نقاط مختصات اجرا می شود و به طور تکراری افزایش نقطه R در حال اجرا با مختصات (x r ، y r) افزایش می یابد. فاصله D بین S و R محاسبه می شود و هنگامی که کوچکتر از طول مرحله ثابت ε انجام شود ، بررسی D را بررسی می کند. این روند تا زمانی که یک نقطه مرزی که فاصله آن از (x s ، y) بزرگتر از مرحله ε است ، تکرار می شود. موقعیت دقیق نقطه محوری بعدی (x ، y) در خط مرز با درون یابی دو نقطه متوالی (x r ، y r) و (x r + 1 ، y r + 1) تعیین می شود.
نقطه (x ، y) به منظور محاسبه نقطه محوری بعدی و غیره ، به نقطه شروع جدید تبدیل می شود ، تا زمانی که به نقطه شروع اولیه S برسد.

شکل 6.
الف) فرض خطی قطعه قطعه (الف) (ب) و الگوریتم دقیق (ج) ؛ب) طرح درون یابی دقیق هندسی ، با نقطه شروع S توسط مختصات (x c ، y c) ، دو نقطه اجرا در مرز متوالی با توجه به (x r ، y r) و (x r + 1 ، y r داده شده است.+ 1) مختصات ، n نقطه جریان جدید به دست آمده توسط درون یابی بین R و R 'و ε طول مرحله ثابت.

شکل 7.
تصویر MRI از کیست استخوانی آنوریسماتیک (A) ، (ب). تکنیک پیاده روی که در مرز کیست استخوانی آنوریسم (C) اعمال می شود.
طول محیط چند ضلعی با اضافه کردن طول مرحله ناقص نهایی به مجموع طول مرحله دیگر مورد نیاز برای پوشاندن کامل مرز یافت می شود.
سپس این روش برای طول مرحله مختلف تکرار می شود [15].
نتایج ، یعنی طول محیط در مقابل طول مرحله ، در طرح ورود به سیستم ریچاردسون ترسیم شده است. از شیب خط مناسب در نقشه ریچاردسون ، ما FD از مرز مورد بررسی را بدست می آوریم [17 ، 12 ، 16 ، 18 ، 19 ، 1 ، 20 ، 21 ، 4]
4. 3الگوریتم شمارش جعبه
اجرای الگوریتم محوطه سازی از روش شمارش جعبه متکی به ایده اصلی پوشش یک تصویر باینری دیجیتال معین با مجموعه ای از جعبه های اندازه گیری اندازه و سپس شمارش تعداد جعبه هایی است که در واقع حاوی تصویر هستند.
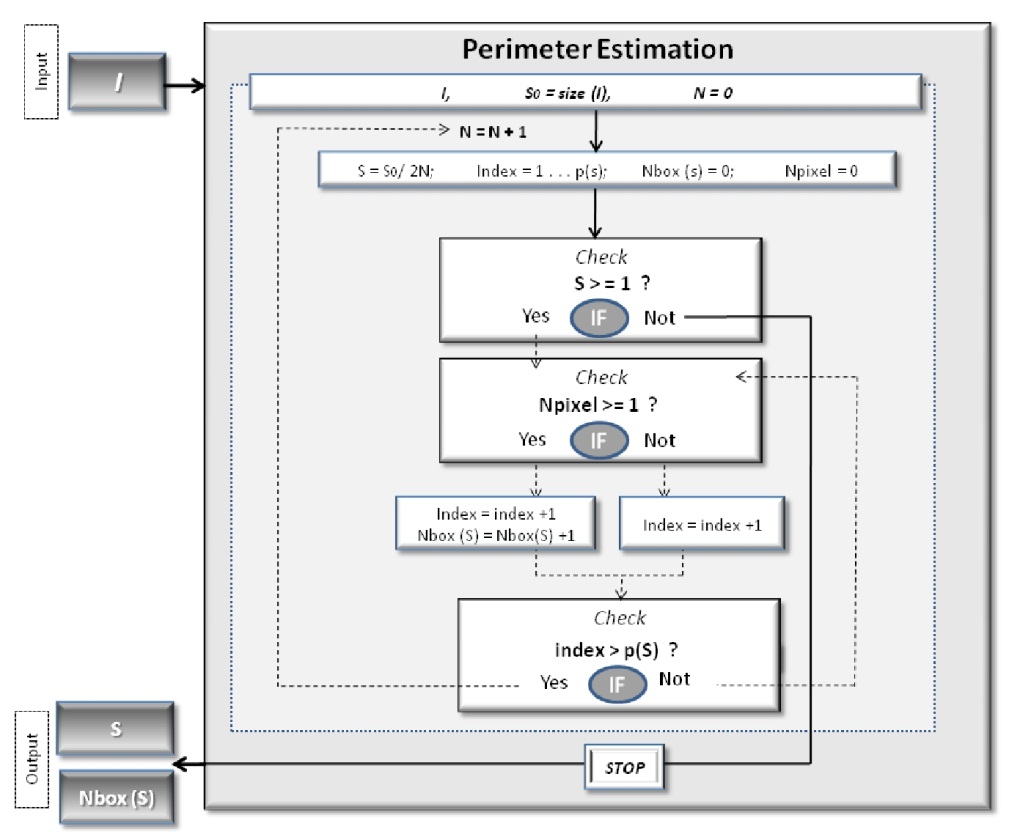
شکل 8.
نماد الگوریتم شمارش جعبه: با توجه به یک تصویر I ، اندازه آن ، S 0 ، به عنوان حداکثر اندازه ای تنظیم شده است که برنامه رایانه ای شروع به محاسبه سایر اندازه های جعبه با توجه به S = S 0 /2 N می کند. مقدار S دارای حداقل مقدار است که برابر با اندازه پیکسل است. شماره P تعداد کل اندازه جعبه را نشان می دهد. مرحله بعدی بررسی این است که آیا حداقل یک پیکسل در جعبه قرار دارد: اگر جعبه غیر خالی باشد ، هنگام یافتن یک پیکسل ، چک متوقف می شود. این روش تا رسیدن به حداکثر شاخص P (ها) ادامه می یابد. سپس شماره n b o x e s (s) برای اندازه خاص ذخیره می شود و فرآیند با اندازه جعبه متفاوت مجدداً راه اندازی می شود. با رسیدن حداقل اندازه جعبه ، برنامه متوقف می شود و به متغیرهای خروجی n b o x e s و مقدار اندازه می دهد. با استفاده از EQ. 8 ابعاد فراکتال D را می توان از کمترین مربع خطی تخمین زد.
شکل 8 نمودار جریان را برای برآورد FD در جعبه و برای اندازه جعبه های مختلف نشان می دهد. علاوه بر این ، از آنجا که روش مقیاس بندی اندازه (S = S 0 /2 N با تعداد N تکرار) ممکن است همیشه برای هیچ اندازه ماتریس تصویر کاربردی نباشد ، بالشتک تصویر با پیکسل های پس زمینه انجام می شود.
بنابراین تصویر نهایی من ابعادی دارد که قدرت 2 است. این کار با استفاده از عملکرد Padarray Matlab به راحتی قابل اجرا است.
4. 4الگوریتم شمارش دیفرانسیل (DBC)
روش شمارش جعبه ابزاری بسیار قدرتمند برای محاسبه FD است. در حقیقت ، اجرای آن و همچنین انعطاف پذیر و قوی است.
با این حال ، یک محدودیت عمده بر این واقعیت نهفته است که روند شمارش جعبه های غیر خالی به معنای استفاده از آن فقط برای تصاویر باینری است نه در مقیاس خاکستری. گسترش رویکرد استاندارد به تصاویر مقیاس خاکستری ، شمارش جعبه دیفرانسیل (DBC) نامیده می شود و در سال 1994 توسط N. Sarkar و Chaudhuri ارائه شده است [8].
در روش DBC ، یک تصویر سطح خاکستری I به عنوان یک سطح مکانی 3 بعدی با (x ، y) در نظر گرفته می شود که پیکسل های مکانی و محور سوم Z را به سطح خاکستری پیکسل می رساند.
در مورد شمارش جعبه استاندارد ، ماتریس تصویر M × M به جعبه های اندازه S × S غیر همپوشانی تقسیم می شود ، جایی که S یک عدد صحیح در فاصله زمانی قرار می گیرد [M / 2،1].
سپس ، مقیاس هر بلوک r = s است. در هر بلوک یک ستون از جعبه های اندازه S × S × S 'وجود دارد که S' نشانگر ارتفاع یک جعبه واحد است. به نام G تعداد کل سطح خاکستری در i ، از این رو S 'توسط رابطه g / s' = m / s تعریف شده است [7].
اجازه دهید شماره 1،2 ، 3. برای گروه بندی سطح خاکستری به جعبه ها اختصاص دهید. بگذارید حداقل و حداکثر سطح خاکستری تصویر در شبکه (i ، j) t h به ترتیب در جعبه k و l قرار بگیرد.
تعداد جعبه های پوشش دهنده این بلوک به این صورت محاسبه می شود:
در شکل 9 به عنوان مثال s = s '= 3 ، از این رو n r = 3 - 1 + 1.
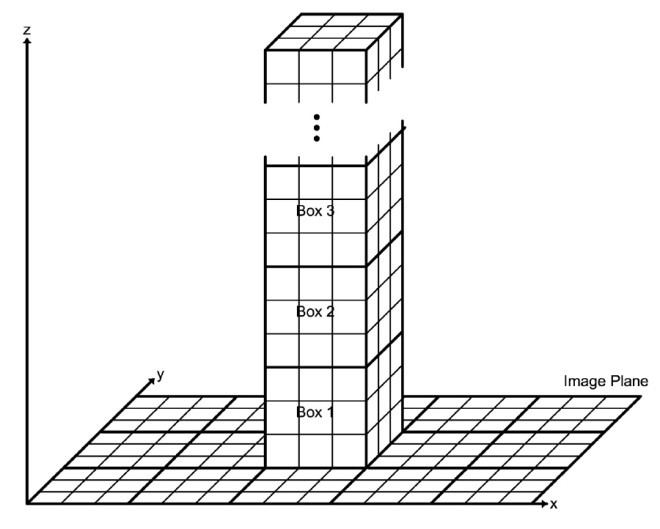
شکل 9
نمونه ای از روش DBC برای تعیین تعداد جعبه های اندازه S × S × S ، هنگامی که S = 3.
گسترش به سهم از همه بلوک ها:
Eq16 برای اندازه جعبه های مختلف محاسبه می شود (بنابراین برای R های مختلف) و مقادیر N R در مقابل مقادیر R در یک نقشه ورود به سیستم ترسیم می شود.
اجرای MATLAB DBC می تواند از توابع مانند B L O C K P R O C یا C O L F I L T استفاده کند تا بتواند پارتیشن بندی جعبه را انجام دهد و EQ را اعمال کند. 15
روش DBC دارای نقاط ضعف در روش مورد استفاده برای انتخاب ارتفاع جعبه مناسب است [7] ، زیرا مقادیر S به اندازه تصویر محدود شده و S با تعداد بلوک های اندازه S × S که در آن محدود است محدود استتصویر تقسیم شده است.
ثانیا ، محاسبه شماره جعبه ممکن است منجر به بیش از حد تعداد جعبه های مورد نیاز برای پوشاندن سطح شود. بگذارید A و B پیکسل های مرتبط با حداقل و حداکثر سطح خاکستری بلوک باشد ، همانطور که در شکل 10 نشان داده شده است.

شکل 10.
نمونه ای از کاربرد روش DBC با جعبه های S × S × S ، هنگامی که S = 3. دو پیکسل A و B ، که حداکثر و حداقل سطح خاکستری بلوک را نشان می دهد ، در دو جعبه متفاوت قرار می گیرند و فاصله در هشت جهت کوچکتر از اندازه جعبه S = 3 دارند.
طبق روش DBC ، دو پیکسل در جعبه های 2 و جعبه ها اختصاص داده شده است. فاصله بین A و B کوچکتر از 3 است که اندازه جعبه است.
از این رو ، هنگام محاسبه Eq. 15 ، این بلوک می تواند توسط یک جعبه واحد پوشانده شود اما پیکسل های آن با حداقل و حداکثر سطح خاکستری در دو جعبه مختلف قرار می گیرند.
برای حل مشکلات فوق الذکر برخی از اصلاحات توسط J. Li ، Q. Du و C. Sun پیشنهاد شده است [7]. با توجه به یک تصویر دیجیتالی I از اندازه m × m ، مقیاس جدید به جای r تعریف می شود ، یعنی r '= r / c که در آن c â ‰ ą 1 یک عدد واقعی مثبت است.
به طور خاص ، بگذارید μ و σ به ترتیب میانگین و انحراف استاندارد I باشند. از این رو ، اگر قسمت بیشتری از پیکسل های تصویر در فاصله سطح خاکستری در [μ - A σ ، μ + A σ] قرار بگیرند ، جایی که A یک عدد صحیح مثبت است ، ارتفاع جعبه ها توسط:
اگر D Z ارتفاع جعبه ها در جهت z باشد ، تعداد ستون جعبه ها در یک بلوک تصویر واحد به جای (D Z / R ' + 1) به جای (D Z / R + 1) مطابقت دارد. در روش اصلی DBC. بنابراین ، از R '
علاوه بر این ، استفاده از d z به جای z برای شمارش تعداد جعبه ها منجر به اصلاح زیر Eq می شود. 15:
با استفاده از سقف (.) که عملکرد آن عناصر کمیت را به (.) به نزدیکترین اعداد صحیح بیشتر یا برابر با آن می رساند.
Eq18 به یک روش جدید برای شمارش تعداد جعبه هایی که سطح بلوک (i ، j) را پوشش می دهد ، متکی است که در آن جعبه ها به حداقل سطح خاکستری به جای سطح خاکستری 0 اختصاص می یابد [7].
به عنوان نمونه ، فرض کنید بلوک (i ، j) t h توسط یک جعبه ستون با اندازه 3 x 3 x 3 پوشانده شده است. اگر پیکسل های A و B حداکثر و حداقل سطح خاکستری بلوک را نشان دهند ، دو پیکسل مانند شکل 10 اختصاص می یابد.
با توجه به Eq. 18 تعداد جعبه های شمارش شده n r = 1 است که دقیقاً تعداد جعبه های پوشش بلوک است.
همانطور که در روش شمارش جعبه استاندارد ، پس از تعیین تعداد NR (I ، J) برای هر بلوک ، تعداد کل جعبه های N R پوشش سطح تصویر کامل برای مقیاس های مختلف R محاسبه می شود. در نهایت با ترسیم تناسب خطی log n r در مقابل log r (طرح ریچاردسون) FD تخمین زده می شود.
5. برنامه ها و بحث
هر روش توصیف شده در Matlab 2010a اجرا شده و برای فراکتال های شناخته شده یا تصاویر زیست پزشکی اعمال می شود.
نتایج حاصل از روش های دست و تقسیم کننده در جدول 1 نشان داده شده است. مقادیر محاسبه شده نیز با مقادیر FD نظری مقایسه می شوند. زمان محاسباتی برای یک پردازنده 2. 50 گیگاهرتز 5i نیز نشان داده شده است.
محدوده مقدار برای اندازه مرحله نمایش داده نمی شود اما بر اساس محاسبه حداکثر قطر کالیبر ساختار که به عنوان محور اصلی یک بیضی تعریف می شود که در آن ساختار تعبیه شده است ، به طور خودکار انتخاب شدند. دامنه سپس از 40 ٪ حداکثر قطر کالیبر به حداقل مرحله تعریف شده به عنوان حداکثر فاصله بین هر دو نقطه مرزی متناوب در حال اجرا بود.
در عمل ، هر دو روش دقیق و ترکیبی اندازه های مرحله مختلف را با مقیاس بندی هر بار حداکثر قدم توسط یک K با k با تعداد تکرار محاسبه می کنند. مقدار انتخاب شده A = 1. 2 یک سازش بین تعداد کافی از نقاط اتصالات و نیاز به جلوگیری از تغییرات بسیار کوچک اندازه مرحله است ، بنابراین برای کپی کردن تخمین محیط. دومی معمولاً در روش ترکیبی اتفاق می افتد تا اگر مرحله در دو تکرار متوالی متفاوت نباشد ، به همان نقاط فعلی برخورد می کند.
عدم اطمینان برآورد پارامتر نیز در جدول 1 نشان داده شده است. که از دقت مناسب بر اساس رگرسیون خطی استاندارد محاسبه می شود.
تعداد نقاط داده مورد استفاده در طرح ریچاردسون حدود 60 و دو نمونه از آن محاسبات با استفاده از دقیق و ترکیبی در شکل 12 نشان داده شده است.
در جدول 2 نتایج محاسبه برای روش شمارش جعبه نیز نشان داده شده است. نوع مقادیر نمایش داده شده شبیه به مقادیر قبلی به استثنای عدم قطعیت شمارش جعبه است. در حقیقت ، نحوه تقسیم یک تصویر در چندین جعبه ممکن است در محاسبه نهایی تعداد جعبه های غیر خالی تأثیر بگذارد.
برای بررسی تنوع FD برای طرح بندی پارتیشن بندی جعبه های مختلف ، زیر مجموعه های جعبه تصادفی اعمال شده است. بنابراین ، نتایج موجود در جدول 2 انحراف استاندارد از FD های مختلف محاسبه شده و میانگین مقادیر برای هر فراکتال مورد نظر را نشان می دهد. به طور کلی ، این تنوع در تصاویر دارای وضوح سخت تر برجسته تر است.
ویدیو های آموزشی فارکس...

ما را در سایت ویدیو های آموزشی فارکس دنبال می کنید
برچسب :
نویسنده : محبوب امانی
بازدید : 48
پيوندهای روزانه
خبرنامه
